Erfolgreicher Einsatz von SIGRINER's Multi-Achsen-Servo
Ein Parallelroboter verfügt über eine bewegliche Plattform oder eine statische Plattform, in der zwei oder mehr unabhängige kinematische Ketten miteinander verbunden sind, und bietet geschlossene Regelkreisstrukturen mit zwei oder mehr parallel betriebenen Freiheitsgraden.
Für den Parallelroboter wird der Motor auf der statischen Plattform platziert, die das Design mit einem geringen Gewicht der beweglichen Teile bietet, um den Roboter mit geringem Gewicht, hoher Geschwindigkeit und kurzen Zyklen zu gewährleisten. In Kombination mit dem visuellen Inspektionssystem und dem dynamischen Greifen wird er weithin in der Leichtindustrie eingesetzt, z. B. in der Lebensmittel-, Medizin- und Elektronikindustrie. Er bietet unvergleichliche Vorteile bei der Materialhandhabung, Verpackung, Sortierung und anderen Vorgängen, die die Produktionseffizienz der Montagelinie erheblich verbessern können.
· 1 Strukturmerkmale
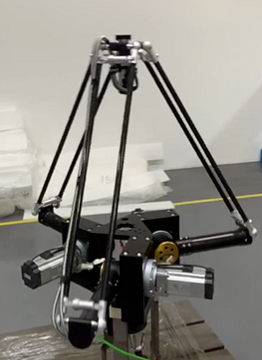
Ein gewöhnlicher Parallelroboter hat vier Achsen, wie in der Abbildung unten dargestellt, die sich um die X-, Y- und Z-Achse verschieben und um die Z-Achse rotieren können. Was die mechanische Struktur betrifft, so ist der Motor über das Getriebe direkt mit dem Hauptarm verbunden, der Hauptarm ist über die Anschlagvorrichtung mit dem Hilfsarm verbunden. Für die statische oder bewegliche Plattform gibt es eine vierte Achse, die sich um die Z-Achse dreht. Während der Bewegung treibt der Motor den Hauptarm an, um innerhalb eines bestimmten Winkels auf und ab zu schwingen, und treibt den Hilfsarm an, um eine genaue Positionierung der beweglichen Plattform zu ermöglichen.
· 2 Ωm-N1 Servoantrieb
Dieser Parallelroboter wird von einem Mehrachs-Servoantrieb der Serie SIGRINER Ωm-N1 angetrieben. Er verwendet den EtherCAT-Bus für die Kommunikation. Die Stromversorgungsarchitektur basiert auf einem DC-Bus, der mehrere kaskadierte Antriebseinheiten zur Stromversorgung unterstützt. Drei- und vierachsige Antriebe können als integrierte Einheit arbeiten und unterstützen eine flexible Anpassung an unterschiedliche Anwendungen.
· 3 Strukturmerkmale
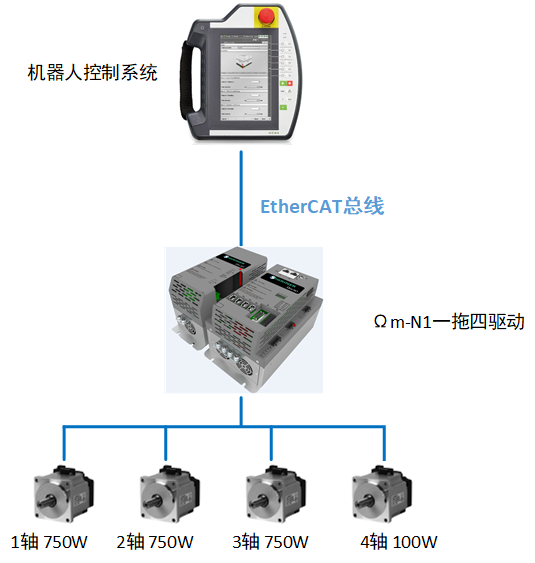

Wie die Abbildung oben zeigt, ist die Robotersteuerung über den EtherCAT-Bus mit dem Antrieb Ωm-N1 verbunden. Die 1., 2., 3. und 4. Achse des Delta-Roboters werden von diesem Antrieb angetrieben. Die starre Einstellung kann einfach und schnell mit einer Taste vorgenommen werden, und die Inbetriebnahme des Systems erfolgt ebenso einfach und schnell, wodurch die Inbetriebnahmezeit auf Kundenseite reduziert wird. Dieser Antrieb bietet eine 3-fache Überlastkapazität und führt eine Hardware-Stromschleifenreaktion durch. Er kann sicherstellen, dass 200 Zyklen/Min. für die standardmäßige torförmige Testaktion erreicht werden. Der optimale Abstimmungsalgorithmus kann den Jitter des mechanischen Körpers während des Hochgeschwindigkeitsbetriebs effektiv reduzieren.
SIGRINER Ωm-N1 zeichnet sich durch eine hohe Leistungsdichte aus, die den Platzbedarf im Vergleich zu einem Servo gleicher Leistung um etwa 30 % reduzieren kann. Durch die Durchsteckmontage kann der Innenraum des Schaltschranks weiter optimiert und sein Schutz verbessert werden.
· 4 Problemlösungen
· Intelligenter Antrieb, Ein-Tasten-Tuning
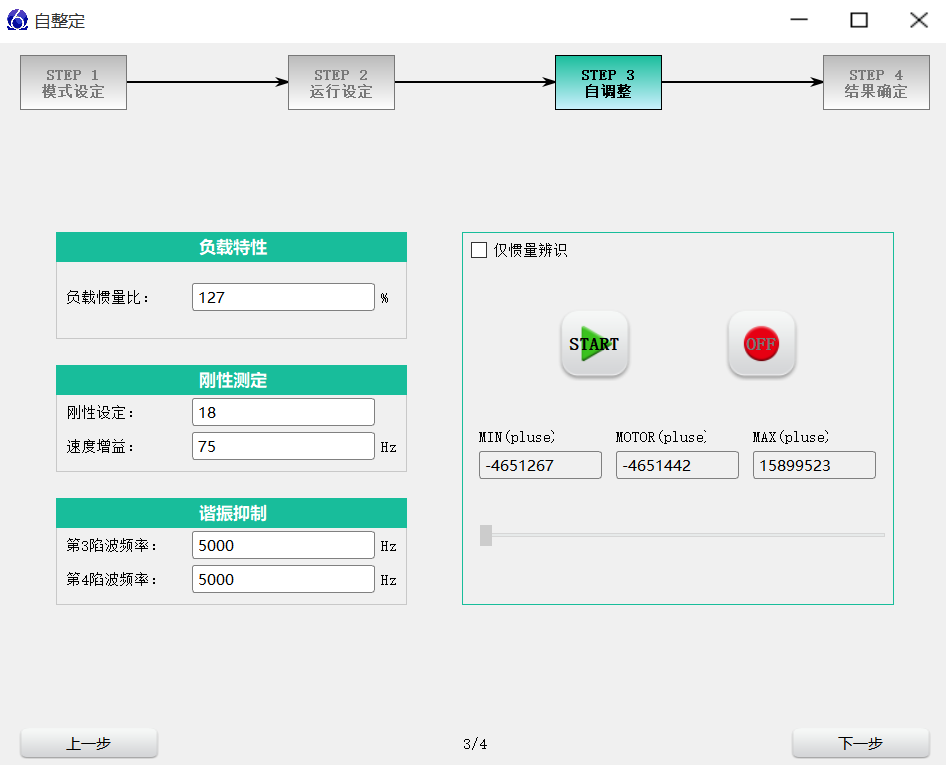

Wie in der Abbildung dargestellt, kann der Kunde mit Hilfe der von der Ω-Plattform bereitgestellten Ein-Tasten-Autotuning-Funktion den Autotuning-Vorgang leicht abschließen, und nach der Abstimmung können die Parameter direkt den Anforderungen der Anlage entsprechen, was die Inbetriebnahmezeit vor Ort erheblich verkürzt.
· Konkrete Überwindung des mechanischen "Parkinson"
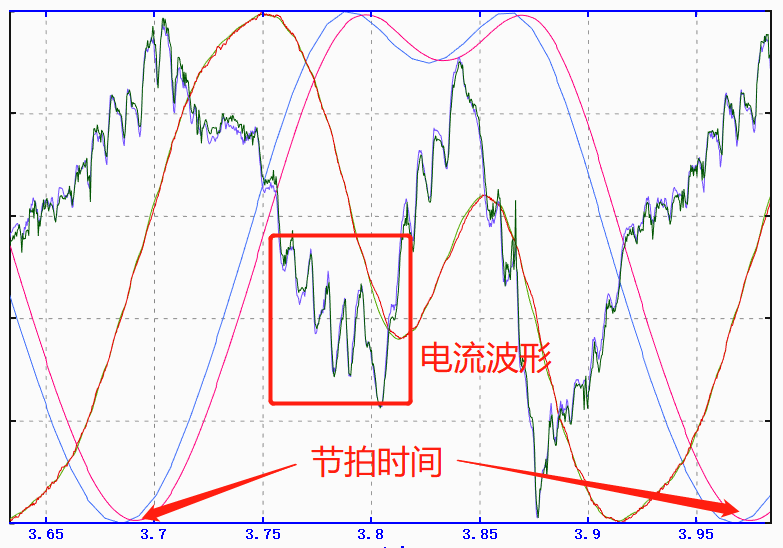
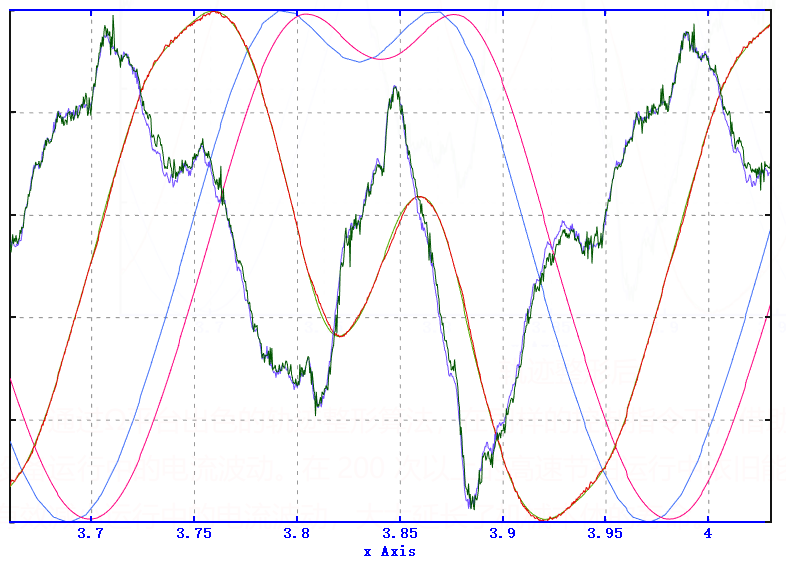
Mit dem optimalen Algorithmus für die Bahnformung der Ω-Plattform und mit demselben Steuerbefehl können die Stromschwankungen beim Betrieb der Anlage wirksam reduziert werden. Bei mehr als 200 zyklischen Hochgeschwindigkeitsvorgängen kann immer noch ein reibungsloser Betrieb des Roboters gewährleistet und die Lebensdauer des mechanischen Körpers verlängert werden.
· Mehrfacher Schutz, sichere Anwendung
Wenn der Parallelroboter mit hoher Geschwindigkeit für so kurze Zyklen läuft, kann er ohne die richtigen Sicherheitsfunktionen im Falle eines Unfalls eine schwere Kollision verursachen. Die Servo-Serien mit Ω-Plattform bieten Schutz vor dynamischem Bremsen, vertikalem Fall, abnormalem Befehl und Sturz, um die maximale Sicherheit der Ausrüstung und der Bediener der Kunden im Falle eines Unfalls zu gewährleisten und die Verluste zu reduzieren.
· 5 Zusammenfassung
Servo mit der Ω-Plattform ist mit dem Standardprotokoll 402 ausgestattet und kann mit den wichtigsten Steuerungssystemen auf dem Markt arbeiten, einschließlich der Robotersteuerungssysteme Keba.
· Kompaktes Design für individuelle Anpassung
Der SIGRINER Ωm-N1-Antrieb erfüllt perfekt die Anforderungen der Parallelroboter, und dank seiner kompakten Bauweise, die so groß wie eine Hand ist, kann er den Platz im Schaltschrank des Kunden sparen. Er unterstützt die Montage auf einer Halterung, was den Platz für die Montage weiter spart und die Anpassung erleichtert.
· Dynamisches Bremsen zur Vermeidung von Kollisionen durch unkontrollierbare Bewegungen
Mit den dynamischen Bremsfunktionen können Kollisionen durch unkontrollierte Befehle oder Aktionen vermieden werden.
· Problemlose Durchführung von Tests, Einsparung von Provisionszeit
Durch die automatische Erkennung der Motorfunktion können Probleme bei der Inbetriebnahme beim Kunden vermieden werden, und es muss nur ein einziger strikter Parameter für die verschiedenen vom Kunden geforderten Reaktionen eingestellt werden, was die Bearbeitungszeit exponentiell reduzieren kann.
